俫俼俥亅俙侽俁
Part2
戞俋夞俼俷俛俷亅俷俶俤偵岦偗偰僶乕僕儑儞傾僢僾拞丅丂
|
杮懱
|
嵽幙 | 俹俷俵丄堦晹俙俛俽 |
| 儊僀儞惂屼婎斅 | 俴倎倱倕倰俆惢丂俴亅俠倎倰倓俙丄俷俽偼俴倝値倳倶 | |
| 僒僽惂屼婎斅 | 昉楬僜僼僩儚乕僋僗惢俫俽倂俛亅侽俀RG | |
| 娭愡悢 | 俀俁 | |
| 巊梡儌乕僞乕 | 俲俼俽亅俀俁係俇俬俠俽丂俼倕倓丂倁倕倰倱倝倧値 |
| 俀侽侽俇擭俁寧侾俁擔
側傫偲偐丄攝慄傪墴偟崬傫偱宍偵側傝傑偟偨丅抐慄摍丄傑偩傑偩晄埨梫慺偼偁傝傑偡偑丄傗偭偲儌乕僔儑儞嶌惉偑弌棃偦偆偱偡丅 |
||||
 |
||||
| 偄偄傾儞僌儖偲巚偭偨偺偵丄撪憼偑娵尒偊丒丒丒 | ||||
| 俀侽侽俇擭俁寧侾俀擔
偄傠偄傠偁傝傑偡側乣丅 偲傝偁偊偢斉偺僾儘僌儔儉偑姰惉傑偟偨丅崱丄俙侽俁偵偮偗偰偁傞僗僀僢僠偼俆偮丅偙偺僗僀僢僠偵懳墳偡傞儌乕僔儑儞僼傽僀儖傪僾儘僌儔儉偺拞偐傜捈愙撉傒庢傞傛偆偵偟偨偺偱丄儌乕僔儑儞捛壛側偳偑偁傞偲僾儘僌儔儉傪僐儞僷僀儖偟側偔偰偼偄偗傑偣傫丅 杮摉側傜丄僥僉僗僩僼傽僀儖偵儌乕僔儑儞僼傽僀儖柤傪彂偄偰偍偄偰丄偙傟傪撉傒弌偟丄弴斣偵嵞惗偟偰偄偔傛偆偵峫偊偰偄偨偺偱偡偑丄偁傑傝怺擖傝偡傞偲娫偵崌傢側偔側傞偺偱偙偺傑傑偵偟偰偍偒傑偡丅 偱丄幚嵺偵俙侽俁偱摦偐偦偆偲揹尮傪擖傟傞偲丄塃屢娭愡偺嵍塃偺儌乕僞乕偑摦嶌偟側偄丅挷傋傞偲丄攝慄偱抐慄偟偰偄傑偟偨丅攝慄偺廋棟偮偄偱偵堷偒夞偟曽傕曄偊偨傝偲戝曄偱偟偨丅 俶亅俠倎倰倓偱僥僗僩偟偰偄偨偺傪俴亅俠倰倎倓俙偱帋偡偲僾儘僌儔儉偑棊偪偰偟傑偆丅僐儞僷僀儖傪僗僞僥傿僢僋偐傜僟僀僫儈僢僋偵曄峏偟偨傜摦嶌俷俲丅娙扨側僾儘僌儔儉偩偲摦偄偨偺偵丅偳偺儔僀僽儔儕偑塭嬁偟偰偄傞偺偐傢偐傝傑偣傫偑偙傟偱傛偟偲偟傑偡丅 俴亅俠倎倰倓俙偱婲偒忋偑傝儌乕僔儑儞嵞惗傪孞傝曉偟偰偄偨傜丄傑偨傑偨暿偺儌乕僞乕偱抐慄丅偙偺帪娫偺柍偄偲偒偵偪傚偭偲偒偮偄偱偡丅偙傟傕壗偲偐廋棟姰椆丅 崱尰嵼偺俙侽俁偼丄摢傕曄峏偟丄崢偺崅偝傪彮偟崅偔偟偰偁傝傑偡丅尰嵼偺恎挿偼係俉丏俁們倣丄偱偐偔側偭偰偟傑偭偨丅惂屼婎斅梡偺僶僢僥儕乕偼丄儂儖僟乕傪嶌傠偆偲巚偭偰偄偨偗偳丄娫偵崌傢側偄偺偱椉柺僥乕僾偲價僯乕儖僥乕僾偱屌掕丅崱丄僼儖廩揹偱婎斅偺揹尮傪傪擖傟丄偳偺偔傜偄帩偮偐帋偟偨偲偙傠偱丄侾帪娫侾侽暘摦嶌偟偰偄偨丅傑偁丄偙傟偼戝忎晇偦偆丅 俴亅俠倎倰倓俙偱柍慄俴俙俶偑偆傑偔偄偭偰偄側偐偭偨偺偼丄寢嬊揹尮梕検偑栤戣偱偟偨丅俴亅俠倎倰倓俙梡偵俆倁俁俙偺儗僊儏儗乕僞偵岎姺偱柍慄俴俙俶傕摦偄偰偄傑偡丅儗僊儏儗乕僞傕偙偙傑偱戝偒偄偺偼偄傜側偄偩傠偆偗偳丄庤帩偪偑偙傟偟偐側偐偭偨丅梋桾偱摦偄偰偄傑偡丅 杮斣偱偼巊偊傞偐偼傢偐傜側偄偑乮梊慖捠夁偟側偄偲偹丒丒丒乯丄墦妘惂屼晹暘偺僥僗僩傕偲傝偁偊偢崱偁傞傕偺偱峔惉偟偰俷俲偱偟偨丅偙偙偼丄傑偨偲傫偱傕側偄峔惉偱丄俫俷俼俬偺俹俽俀梡柍慄僎乕儉僐儞僩儘乕儔傪僶僢僼傽儘乕偺BGC-UPS101/SV偱倀俽俛偵曄姺偟偰丄僲乕僩俹俠偵愙懕偟傑偡丅偙偺怣崋偺庢傝崬傒偼丄joy2key偲偄偆僜僼僩偱僉乕儃乕僪偺偐傢傝偲偟偰摦嶌偝偣傑偡丅 師偵丄僲乕僩俹俠偐傜俙侽俁偵柍慄俴俙俶宱桼偱telnet偟偰儘僌僀儞偟傑偡丅偙偙偱丄墦妘憖嶌梡僾儘僌儔儉傪婲摦偟丄僐儞僩儘乕儔乕偺儃僞儞偵懳墳偟偨儌乕僔儑儞傪嵞惗偡傞傛偆偵偟偰偄傑偡丅 偦偆偙偆偟偰偄傞偲丄傑偨暿偺儌乕僞乕攝慄偑抐慄丅攝慄宯偑偪傚偭偲傊偨偭偰偒偰偄傞傛偆偱偡丅 偙傟偐傜偺嶌嬈偼丄傗偭傁傝儌乕僔儑儞嶌惉偱偡偹丅俙侽俁偺幨恀偼丄嬤擔岞奐偱偒傞偲巚偄傑偡丅 |
||
| 俀侽侽俇擭俁寧俈擔
俙侽俁偺惂屼偼丄俴亅俠倎倰倓俙偐傜昉楬婎斅偵懳偟偰儌乕僔儑儞僨乕僞傪憲傝崬傫偱摦偐偟傑偡丅 尰帪揰偱偼丄傑偩僾儘僌儔儉嶌惉偼姰椆偟偰偄側偄丅儌乕僔儑儞嶌惉傕側偐側偐恑傑側偄偺偱丄偙偙俀丄俁擔偼惂屼僾儘僌儔儉偺嶌惉傪偟偰偄傑偟偨丅 惂屼僾儘僌儔儉偲偄偭偰傕偦傫側擄偟偄傕偺偱偼側偔丄僗僀僢僠傪墴偡偲壗斣栚偺僗僀僢僠偐敾掕偟偰昉楬婎斅傊儌乕僔儑儞僨乕僞傪憲傝崬傓偲偄偆傕偺偱偡丅 嬤擭丄傑偲傕偵僾儘僌儔儈儞僌偟偰偄側偄偺偲丄愄偐傜偁傑傝戝偒側僾儘僌儔儉傪彂偄偰偄側偄偺偲偱丄娭悢偺摦嶌傪妋擣偟側偑傜偺僾儘僌儔儈儞僌偵側傝丄偙傟傑偨帪娫偑偐偐偭偰偄傑偡丅 偲偼尵偆傕偺偺丄丄偲傝偁偊偢斉僾儘僌儔儉傕傕偆偡偖弌棃偦偆偱偡丅 俙侽俁偺峔惉偼丄俴亅俠倎倰倓俙偲昉楬婎斅偼俼俽俀俁俀俠偺俋俇侽侽俛俹俽偱愙懕偟丄昉楬婎斅偺僨僕僞儖擖椡抂巕偵僗僀僢僠傪俆屄庢傝晅偗偰偁傝傑偡丅摉慠偱偡偑丄昉楬婎斅偐傜奺僒乕儃儌乕僞乕偵愙懕偟偰偄傑偡丅 惂屼偲偟偰偼丄俴亅俠倎倰倓俙偐傜*C01DI僐儅儞僪傪憲怣偟丄偳偺僗僀僢僠偑墴偝傟偨偐傪敾掕丄偦偺僗僀僢僠偵妱傝怳偭偨儌乕僔儑儞傗億乕僘僨乕僞傪*C01HS傗*C01SN側偳偺僐儅儞僪偱憲怣丄*C01DI偱僗僀僢僠傪敾掕丄傪孞傝曉偡傛偆偵偟偰偄傑偡丅 崱尰嵼丄僗僀僢僠傪墴偟偰僨乕僞憲怣偡傞偲偙傠傑偱摦嶌偟偰偄傑偡偑丄僨乕僞偑戝偒偄偲屌傑偭偰偟傑偆晹暘偑偁傞偺偱丄傑偩廋惓偑昁梫偱偡丅 幚嵺偺僾儘僌儔儉奐敪偼丄俴亅俠倎倰倓俙偱偼側偔俶亅俠倎倰倓傪巊梡偟偰偄傑偡丅傑偨丄僔儕傾儖捠怣晹暘偺僨乕僞傪尒傞偨傔偵俹俠僇乕僪僞僀僾偺僾儘僩僐儖傾僫儔僀僓乕傪巊偭偰偄傑偡丅傗偭傁傝偙傟偑側偄偲丄偪傖傫偲僨乕僞乕偑憲傜傟偰偄傞偐傢偐傜側偄偱偡偹丅偙偺傾僫儔僀僓乕偼丄億乕僩揹巕偐傜敪攧偝傟偰偄傞PA-1100偲偄偆傕偺偱偡丅俇枩墌偪傚偭偲偩偭偨偐側丅屄恖偱偺峸擖偲偟偰偼崅偄偱偡偑丄懠偺実懷宆偺傕偺偼婡擻傕廩幚偟偰偄傞偱偟傚偆偑侾俉枩墌偲偐偦傟埲忋偡傞偺偱丄傗偭傁傝屄恖偱偼偙傟偱廫暘偱偡丅巹偺応崌丄VAIO-U71P偵僀儞僗僩乕儖偟偰偄傑偡偑丄僂傿儞僪僂傕800X600偵廂傑傞偺偱偪傚偆偳偄偄姶偠偱偡丅 傕偆彮偟偱僾儘僌儔儉姰惉丅偁偲偼丄偠偭偔傝儌乕僔儑儞嶌惉偱偒傟偽椙偄偗偳丒丒丒 |
||
| 俀侽侽俇擭俁寧俀擔
戝夛傑偱擔偑側偔側偭偰偒偰偄傞偺偵丄側偐側偐埨怱偱偒傞巇忋偑傝偵側傝傑偣傫偹丒丒丒 偲偼尵偭偰傕丄彮偟偢偮偱傕恑傔側偄偲杮摉偵娫偵崌傢側偔側偭偰偟傑偆丅 偲偄偆偙偲偱丄儌乕僔儑儞偺嶌惉偼丄婲偒忋偑傟偢摢撍偒儌乕僔儑儞偲壔偟偰偄偨埲慜嶌惉偟偨儌乕僔儑儞傪偪傑偪傑偲廋惓偟丄偳偆偵偐婲偒忋偑傟傞傛偆偵側傝傑偟偨丅傕偆彮偟旝挷惍偑昁梫偲巚偆偺偱偡偑丄庢傟偰偟傑偭偨摢傕傑偩庢傝晅偗偰偄側偄偺偲丄僶僢僥儕乕偺埵抲曄峏傪傑偩傗偭偰偄側偄偺偱庢傝晅偗姰椆屻偵嵞挷惍偟傛偆偲巚偄傑偡丅 曕峴儌乕僔儑儞傕埲慜嶌惉偟偨傕偺傪廋惓偟偰丄側傫偲側偔曕偄偰偄傑偡丅傑偩懌傪偡偭偰偟傑偭偨傝丄嵍塃偱摦偒曽偑堘偆側偳偑偁傞偺偱丄傕偆彮偟姰惉搙傪偁偘側偔偰偼側傝傑偣傫丅 墶曕偒偼丄傑偩懯栚偱偡偹丅僶儔儞僗傪偔偢偟偰旘傫偱偄偭偰偟傑偄傑偡丅偱傕丄偙偙傑偱偔傟偽丄帠慜怰嵏偺儌乕僔儑儞姰惉傕傕偆偡偖偐側丅 儌乕僔儑儞嶌惉偑丄側偐側偐偼偐偳傜側偄棟桼偲偟偰丄昉楬婎斅偺儌乕僔儑儞嶌惉僜僼僩偺憖嶌惈偑巹偵偼側偐側偐側偠傔側偄偲偄偆偙偲偱偡偐偹丅Visual Studio 2005 Professional Edition 傾僢僾僌儗乕僪斉偑撏偄偨偺偱儌乕僔儑儞嶌惉僜僼僩傕帺慜偱嶌偭偰偟傑偆帠傕峫偊偰偄傑偡偑丄崱夞偵偼娫偵崌偄傑偣傫丅 俴亅俠倎倰倓俙偺柍慄俴俙俶偺挷巕偑偍偐偟偄強偵偮偄偰偼傑偩挷傋偰偄側偄偺偱偡偑丄偙偺挷巕偱峴偔偲丄俶亅俠倎倰倓偵忔偣偐偊傞偐傕抦傟傑偣傫丅俴亅俠倎倰倓俙偲俶亅俠倎倰倓偺幚峴僼傽僀儖偺嶌惉偼丄婎杮揑偵摨偠僐儞僷僀儖娐嫬偱嶌惉偟偰偄傑偡丅 堘偄偲偟偰偼丄僔儕傾儖億乕僩偑俴亅俠倎倰倓俙偱偼/dev/ttyS2傪巊梡偟偰偄偰俶亅俠倎倰倓偱偼/dev/ttyS1傪巊梡偟偰偄傞偲偙傠偲丄僐儞僷僀儖僆僾僔儑儞偱儔僀僽儔儕偵娭偟偰丄俴亅俠倎倰倓俙偱偼僟僀僫儈僢僋儕儞僋丄俶亅俠倎倰倓偱偼僗僞僥傿僢僋儕儞僋偵偟偰偄傑偡丅 偳偭偪偵偟偰傕丄傑偩巊偊偦偆側僾儘僌儔儉偵側偭偰偄側偄偱偡偑丄嶲峫偵側傝偦偆側僜乕僗傪尒偮偗偨偺偱傕偆彮偟帋偟偰傒偰丄偲傝偁偊偢斉偔傜偄偼嶌傞梊掕偱偡丅 |
|||
| 俀侽侽俇擭俀寧俀俈擔
側偐側偐儌乕僔儑儞嶌惉偑恑傫偱偄傑偣傫偑丄摲懱偑廳偔側偭偰婲偒忋偑傟側偔側偭偨儌乕僔儑儞偵侾偮偐俀偮偺億乕僘傪捛壛偟偰僗僺乕僪偺挷惍傪偡傞偙偲偱婲偒忋偑傟偦偆側姶偠丅偱丄怓乆偲帋偟偨偺偱偡偑偳偆偵傕婲偒忋偑傟側偄丅偲偄偆偙偲偱丄摲懱撪晹偵擖傟偨僶僢僥儕乕傪庢傝奜偟傑偟偨丅杮摉偼奜偟偨偔側偐偭偨丒丒丒丅庢傝晅偗曽朄傕峫偊側偄偲偹乕丅 偙傟偱峴偗傞偐偲巚偭偨傜丄偦偆偱傕側偄丅偆傑偔婲偒忋偑傜側偄偺傪孞傝曉偟偰偄偨傜丄偹偠偑偍傟偰摢偑傕偘偰偟傑偭偨丅 彮偟億乕僘傪廋惓偟偰丄椙偔偼側偭偨偑埨掕偟偰婲偒忋偑傟側偄丅傕偆彮偟廋惓偑昁梫偱偡丅 墶曕偒傕傑偩懯栚丅曕峴偼丄埲慜偺僨乕僞偱摦偐偡偲偡偖偙偗偰偟傑偆丅廋惓偡傞偲椙偔側偭偰偒偨丅傑偩曕偄偰偄側偄偗偳丄傕偆偡偖傛偪傛偪曕偒偑弌棃偦偆丅 捠怣僾儘僌儔儉傕丄幚尡梡偺僐乕僪偱彮偟偽偐傝恑傫偱偒傑偟偨丅僜僼僩壆偝傫偩偲丄乽偦傫側偺娙扨偠傖傫両乿掱搙偺傕偺偲巚偆偺偱偡偑丄帺暘偱嶌傞偵偼側偐側偐偆傑偔偄偐側偄偱偡偹丅杮摉偼傕偆彮偟崅搙側嶌傝偱峫偊偰偄偨偺偱偡偑丄偳偆傕娫偵崌偄偦偆傕側偄偺偱娙堈斉偲偟偰嶌傠偆偲峫偊偰偄傑偡丅 俙侽俁傪摦偐偡巇慻傒偼丄昉楬偺僜僼僩偱嶌惉偟偨曕峴偲偐儂乕儉側偳偺儌乕僔儑儞傗億乕僘傪憲怣宍幃偺僼傽僀儖偱曐懚偟偨暔傪俴亅俠倎倰倓俙偵抲偄偰偍偒丄僾儘僌儔儉偱俴亅俠倎倰倓俙偐傜昉楬婎斅偵僐儅儞僪傪憲傝崬傓曽朄偱偡丅 昉楬婎斅偼丄*C01SNxxxxxxxx丒丒丒偰側姶偠偺僐儅儞僪偵側偭偰偄偰丄墳摎偁傝偲墳摎側偟偺僐儅儞僪偑偁傞丅 幚嵺偵俙侽俁傪摦偐偡偲偒偵丄墳摎側偟偺僐儅儞僪偱楢懕偟偰憲怣偡傞偲丄昉楬婎斅偑僴儞僌傾僢僾偟偰偟傑偆偺偱丄墳摎偺張棟傕嶌傝偙傫偱偍偐側偄偲傑偢偄偩傠偆側丒丒丒 俴亅俠倎倰倓俙偱柍慄俴俙俶偑偆傑偔婲摦偟側偔側偭偰偄傞丅偙傟傕偳偆偵偐偟側偔偰偼丒丒丒 偪傚偭偲慜傑偱偼丄乽偐傞偔儎僶僀乿忬懺偲巚偭偰偄偨偺偵丄崱偼乽偐側傝儎僶僀乿偵嬤偯偄偰偄傞傛偆側姶偠丅 |
|||||||
 |
 |
||||||
| 婲偒忋偑傝儌乕僔儑儞偱摢偐傜寖撍傪孞傝曉偟偰偄偨傜丄摢偑庢傟偰偟傑偭偨丅偹偠偑愜傟偰偄傑偡丅 | 奜偟偨僶僢僥儕乕傪俁杮偺僷僢僋偵嶌傝曄偊傑偟偨丅庢傝晅偗梡偵傑偨俹俷俵偱晹昳傪嶍傜側偔偰偼丒丒丒 | ||||||
| 俀侽侽俇擭俀寧俀俁擔
慜偵彂偒崬傫偩拞偱丄僄儞僩儕乕悢偵偮偄偰丄壗偐姩堘偄偟偰偄偨傛偆偱俀俁侽傕偄側偄偱偡偹丅 尒偰偄傞偲偙傠偑堘偭偨傛偆偱偡丅幐楃偟傑偟偨丅 偰側偙偲偱丄俙侽俁偺傎偆偱偡偑丄側偐側偐恑傑側偄偱偡偹丅 尰嵼丄儌乕僔儑儞傪怓乆偲嶌惉偟偰偄傞偺偱偡偑丄巚偭偨傛偆偵摦偐側偄丅偱丄慜夞嶌惉偟偨儌乕僔儑儞傪摦偐偟偰傒傞偲丄僒乕儃偺埵抲偑彮偟曄傢偭偨偙偲偲丄摲懱偵僶僢僥儕乕傪捛壛偟偨偙偲偑尨場偱偆傑偔峴偐側偄丅 慜夞偺儌乕僔儑儞嶌惉偱丄婲偒忋偑傝偑寢峔嬯楯偟偰偄偨偺偱偡偑丄嵟屻偵棫偪忋偑傞偲偙傠偱丄庤傪堦婥偵僺儞偲怢偽偟偨斀摦偱棫偪忋偑偭偨偺偱偡偑丄崱夞偼僶僢僥儕乕偑捛壛偵側偭偰偄傞偺偱帩偪忋偑偭偰偙側偄忬嫷丅忋偑傜側偄偺偱丄堦婥偵摢傪彴柺偵偨偨偒偮偗傞姶偠偵側偭偰偄傞丅偙傟偱庱偺戜嵗偑嬋偑偭偰偟傑偄傑偟偨丅偦偺偆偪廋棟偑昁梫偱偡丅 摲懱偵慻傒崬傫偩僶僢僥儕乕偼偢偡偟偐側偄偐側丒丒丒丅偳偆偟偰傕廳偔偰婲偒忋偑偭偰偔傟側偄丅 墶曕偒傕側偐側偐恑傑側偄偺偱丄儂乕儉億僕僔儑儞乮捈棫乯偐傜丄塃懌嬋偘丄塃懌怢偽偟丄嵍懌嬋偘丄嵍懌怢偽偟偺弴偱壗夞傕傝曉偡摦嶌偱僗僺乕僪傪憗偔偟偰摦偐偟偰傒偨丅 偒偭偲僶儔儞僗傪偔偢偟偰旘傫偱偔偲巚偭偰偄偨偑丄寢峔偄偗偦偆丅偦偺応偱嬱偗懌傪偟偰偄傞傛偆側姶偠丅 墶曕偒傕丄慜偵嶌偭偨偺偲堘偆摦嶌偱傕偆堦偮帋偟偰偄傞偑丄偙傟傕側偐側偐偆傑偔峴偐側偄丅 彮側偔偰傕丄帠慜怰嵏暘偺儌乕僔儑儞偺姰惉偑昁梫偱偡丅 偙傫側偙偲傗偭偰傞偗偳丄俴亅俠倎倰倓俙偲昉楬婎斅偺捠怣僾儘僌儔儉傕拞抐偟偰偄傞丅傑偩帪娫偑偐偐傝偦偆丒丒丒 |
|||
| 俀侽侽俇擭俀寧侾俆擔
嶐擔丄戞俋夞俼俷俛俷亅俷俶俤偵僄儞僩儕乕偟傑偟偨丅 慖庤搊榐偺偲偒傕俁夞偦偆偱偟偨偑丄俼俷俛俷亅俷俶俤偺僄儞僩儕乕傕俇夞丄僄儔乕偵側偭偰偟傑偭偨丅埨掕偟偰偄側偄傫偱偡偐偹丅 偱丄崱擔俀俀帪慜偵僄儞僩儕乕儕僗僩傪妋擣偟傑偟偨丅 憤僄儞僩儕乕侾俁俈偲側偭偰偄偨偺偱丄弴偵儁乕僕傪憲偭偰傒傞偲丄侾俁俈傛傝傑偩屻偑偁偭偨偺偱丄師乆憲偭偰傒傞偲丄側傫偲俀俁侽傕僄儞僩儕乕偟偰偄傞丅偡偛偄丒丒丒丅嵟廔偰偒偵偼丄偳偺埵偵側傞偺偐側丅 偦傟偼偦傟偲偟偰丄俙侽俁偺尰忬偼丄壗偲偐扨係宆僯僢働儖悈慺俇杮僷僢僋傕摲懱偺拞偵擖傟傑偟偨丅慜偵嶌偭偨揹尮晹暘偺婎斅偵摉偨傞偺偱丄婎斅庢傝晅偗埵抲傪曄峏丅 偙傟偱摲懱慻傒忋偘偲巚偭偨傜丄揹尮婎斅偲俴亅俠倎倰倓俙偺僐儞僨儞僒乕偑摉偨偭偰偟傑偆丅 寢嬊丄俴亅俠倎倰倓俙偺庢傝晅偗晹暘偵俆倣倣偺僗儁乕僒乕傪擖傟偰庢傝晅偗傑偟偨丅嵟嬤偺嶌嬈偼丄偳偆傕偮偓偼偓偩傜偗偵側偭偰偒偰偄傞丅 俙侽俁杮懱偱偁偲傗傞偙偲偼丄摲懱懁柺傪傆偝偖奧偲丄攝慄張棟偐側丅 儌乕僔儑儞嶌惉偼丄側偐側偐恑傫偱偄傑偣傫丅慜夞偺戝夛堏峴偵僒乕儃傪廋棟偟偰庢傝晅偗偨偲偙傠偺埵抲偢傟偱丄慜夞嶌惉偟偰偄偨儌乕僔儑儞偑偦偺傑傑巊梡偱偒側偄偺偱丄寢嬊丄廋惓偲嶌傝捈偟傪偟偰偄傞嵟拞丅 娙扨側孅怢偼摦偄偰偄傑偡偑丄崱偼墶曕偒傪嶌偭偰偄傑偡丅偙傟偑弌棃傟偽丄慜夞嶌偭偨偆偮暁偣偐傜偺婲偒忋偑傝儌乕僔儑儞傪廋惓丅偦偺屻偑栤戣偱丄曕峴儌乕僔儑儞偺廋惓丅慜夞摦偐偟偨偲偒偵丄寢峔億乕僘偑懡偔側偭偰偄傞偺偱慡晹偄偠傜側偄偲偄偗側偄偱偪傚偭偲傔偘偦偆偱偡丅 戝夛傑偱傕偆彮偟丅偑傫偽傜側偔偰偼丒丒丒 |
|||
| 俀侽侽俇擭俀寧俇擔
俴亅俠倎倰倓俙偲昉楬婎斅偺捠怣晹暘偺僾儘僌儔儉傪傕偆彮偟傑偲傕偵偟傛偆偲巚偄丄媣乆偵俙侽俁傪摦偐偟偰傒偨丅 偁傟両丄嵍屢娭愡偺嵍塃曽岦偑偆傑偔摦偐側偄丅 怓乆偲挷傋偰傒傞偲丄僒乕儃傪廋棟偟偨偲偒偵俥俤俿偑偆傑偔晅偄偰偄側偐偭偨偺偑尨場丅敿揷晅偗傗傝捈偟偱暅媽偟傑偟偨丅 偱丄慜夞偐傜傑偩巆偭偰偄偨壽戣偲偟偰丄昉楬婎斅偵儂乕儉億僕僔儑儞傪搊榐偡傞偲丄慡僒乕儃偑堦婥偵摦嶌偟揹尮晄埨掕偲側傝丄俴亅俠倎倰倓俙傗昉楬婎斅偑儕僙僢僩偟偰偟傑偆偲偄偆偺偑巆偭偰偄傑偟偨丅 傗偭傁丄揹尮偼暘妱偡傞偙偲偵偟偰丄婎斅傪嶌傝捈偟傑偟偨丅偙傟偵敽偄丄僶僢僥儕乕傕傕偆侾庬椶嶌惉偟傑偟偨丅廐寧偱峸擖偟偨扨係宆侾侽侽侽倣俙倛傪俇杮僷僢僋偵偟傑偟偨丅 僶僢僥儕乕偺搵嵹埵抲偼丄摲懱撪偵妋曐偱偒偦偆側偺偱偡偑丄攝慄傪惍棟偟側偄偲尰忬偱偼擖傜側偄丅嬤偄偆偪偵偽傜偝側偔偰偼偄偗側偄丅 偲傝偁偊偢丄慜夞傑偱偵嶌惉偟儌乕僔儑儞傪摦偐偟偰傒傞偲丄懌偺埵抲偑偢傟偰偄傞丅僒乕儃廋棟偱埵抲偑彮偟偢傟偨傛偆偱偡丅偪傑偪傑偲丄億乕僘傪廋惓偟偰偄傞嵟拞偱偡丅 崱屻偺梊掕偲偟偰偼丄儌乕僔儑儞偺捛壛丄捠怣僾儘僌儔儉廋惓丄墦妘僐儞僩儘乕儖晹曽朄側偳丒丒丒 傑偩丄傗傞偙偲偄偭傁偄巆偭偰偄傑偡偹丅 慜夞宖嵹偟偨揷媨儌乕僞乕傪巊梡偟偨僒乕儃偱偡偑丄侾乛俁俇丄侾乛俈俆丄侾乛俁侽侽偺僊儎斾偺俁庬椶傪帋偟偰傒偨寢壥丄崱偺偲偙傠侾乛俈俆偺傕偺偱峴偙偆偲巚偄傑偡丅偙傟丄俙侽俁偵搵嵹偡傞傢偗偱偼側偔丄師婜儘儃僢僩梡偱偡偹丅俙侽係偐側丒丒丒 杮摉偼丄俙侽係偼僗僥僢僺儞僌儌乕僞乕斉偱峫偊偰偄偨偺偱偡偑丄拞抐偟偰偄傞偺偱俙侽係偼揷媨儌乕僞乕斉偱峴偒傑偡偐丅 |
|||||||
 |
 |
||||||
| 嵍偑慜夞傑偱偺婎斅偱丄塃偑崱夞嶌傝捈偟偨婎斅丅 | 扨係宆侾侽侽侽倣俙倛傪俇杮僷僢僋偟偨傕偺丅偳偆偵偐摲懱撪偵廂傔側偔偰偼丒丒丒 | ||||||
| 俀侽侽俇擭侾寧侾俈擔
傕偆彮偟彂偒崬傓廃婜傪憗偔偟傛偆偲巚偄偮偮丄傑偨偙傫側偵帪娫偑偨偭偰偟傑偄傑偟偨丅 崱傑偱偺帠傪傑偲傔偰彂偔偺偱彮偟挿偔側傝傑偡偑姩曎偟偰偔偩偝偄丅 偰側偙偲偱丄侾寧俁擔偵丄寢嬊丄俲俼俽亅係侽侾係俫倁傪攦偭偰偟傑偄傑偟偨丅偱丄偄偮傕偺條偵暘夝丒丒丒 帋偟偰傒偨偄帠偼丄僔儕傾儖捠怣偱偺惂屼偱丄僒乕儃傪僷儔偭偰愙懕偟偰偦傫側晽偵側傞偐丒丒丒 偱傕丄俲俷偺俫俹偵偼傑偩僐儅儞僪巇條傗僜僼僩偑岞奐偝傟偰偄側偄丄巆擮丅 揷媨偺僊儎乕僪儌乕僞乕偺傎偆偼丄儌乕僞乕儅僂儞僩傪俹俷俵偱嶌惉丄億僥儞僔僆儊乕僞偲偺僇僢僾儕儞僌晹昳傪俲俽亅俀侽侽夵憿偺俶俠慁斦偱嶌惉偟傛偆偲丄恀鐹偐傜嶍傝偩偟偰偄偨偺偱偡偑丄偳偆傕偆傑偔峴偐偢乽儌乕僞乕偵晅懏偟偰偄偨傾儖儈僷乕僣傪壛岺偟偰巊梡偟傑偟偨丅 儌乕僞乕傕億僥儞僔僆儊乕僞傕庢傝晅偗丄揹尮俷俶丅俲俷偺婎斅偺俁侽侽係俥俤俿偐傜墝偑丒丒丒 挷傋偰傒傞偲丄僊儎乕僪儌乕僞乕傪俹俷俵偵庢傝晅偗傞偹偠偑挿偡偓丄僊儎偺儅僂儞僩晹暘傪偮傇偟偰偟傑偭偰偄傑偟偨丅 僊儎斾侾乛俈俆偺偱帋偟偨偐偭偨偺偱偡偑丄侾乛俁侽侽偵岎姺偟偰僒乕儃偲偟偰摦嶌偱偒傑偟偨丅 偱傕丄抶偄丅僗僩僢僾僂僅僢僠偱庤寁應偱栺0.37sec/60亱丅偦偺偐傢傝丄僩儖僋偼敳孮丅 偙傟偱偼丄乽憱傞乿偵偼巇條偱偒側偄偺偱丄崱搙丄侾乛俈俆偲侾乛俁俇偺僊儎斾偺傕偺偱傕帋偟偰尒傑偡丅 |
||||||||||
 |
 |
|||||||||
| 俲俼俽亅係侽侾係俫倁偲俲俼俽亅係侽俀係俫倁傪暲傋偨偲偙傠丅奜宍僒僀僘偼摨偠偱偡丅嬥懏僊儎側偺偱儂乕儞傪庢傝晅偗傞億僢僠傕傾儖儈偱偡丅 | 偍寛傑傝偺暘夝丅係侽俀係偲偼儌乕僞乕偑堘偆偺偱丄婎斅偺僷僞乕儞傕堘偄傑偡偹丅 | |||||||||
 |
||||||||||
| 僊儎懁偱偡丅僒僀僘傕偱偐偔側傝丄偟偭偐傝偟偨傕偺偑擖偭偰偄傑偡丅 | ||||||||||
 |
 |
|||||||||
| 儌乕僞乕儅僂儞僩傊偺庢傝晅偗偱偹偠偑挿偡偓偰丄偙傫側偵側偭偰偟傑偄傑偟偨丅 | 偙偺捠傝丅弌椡幉偺僊儎偑偁偨偭偰偄傑偡丅偙傟偱偼儌乕僞乕偵晧壸偑偐偐傝俥俤俿偑偲傫偱傕巇曽側偄偱偡偹丅 | |||||||||
 |
||||||||||
| 婥傪庢傝捈偟偰丄庤帩偪偺侾乛俁侽侽偺僊儎斾偺傕偺偲岎姺偟偰摦偐偟偰傒傑偟偨丅
摦偒偼抶偄偑丄偪傖傫偲栚昗抣偱廂懇偟偰掆巭偟偰偄傞丅 侾乛俈俆傗侾乛俁俇傕憗偄偲偙帋偟偰傒偨偄偱偡偹丅 偪傖傫偲栚昗抣偱掆巭偡傞偺偐側丠 |
||||||||||
| 俀侽侽俇擭侾寧俀擔
擭偑柧偗偨偲偄偆偺偵丄偁傑傝恑捇偟偰偄傑偣傫丅 摢偺拞偱偼怓乆側峔憐偑偁傞偺偱偡偑丄側偐側偐恑傑側偄忬嫷偱偡丅 俲俼俽亅係侽俀係俫倁偼丄婎斅傑偱奜偟偰偟傑偄傑偟偨丅 億僥儞僔僆儊乕僞偼丄傾儖僾僗惢偺暔偱彫偝偄僞僀僾偺暔偑擖偭偰偄傑偟偨丅侾侽俲兌偺傛偆偱偡丅 揷媨偺僊儎乕僪儌乕僞乕傪幚尡梡偵峸擖偟偰偁偭偨傕偺偵俹俷俵偱戜嵗傪嶌傝傑偟偨丅傕偆彮偟晹昳傪嶌偭偰偐傜幚尡偱偒偦偆偱偡丅 偱丄偙傟偼壗傪峫偊偰偄傞偐偲偄偆偲丄乽壌僒乕儃乿傪嶌傜傟偰偄傞曽偑寢峔偄傞偲巚偆偺偱偡偑丄儌乕僞乕傗儌乕僞乕嬱摦梡偺婎斅傪帺暘棳偵嶌偭偰傗傜傟偰偄傞偲巚偆偺偱偡偑丄巹偺応崌丄弌棃崌偄偺暔偺拞恎側偳傪慻傒崌傢偣偰弌棃側偄偐側側傫偰峫偊偱丄揷媨偺僊儎乕僪儌乕僞乕偲俲俷偺婎斅偱僒乕儃偵偟偨傜偳偆側傞偐側偰側偲偙傠偱偡丅 偙傫側傗傝曽偩偲乽壌僒乕儃乿偱偼側偔偰乽壌壌僒乕儃乿偱偟傚偆偐丒丒丒乮暿偵嵓媆偱偼側偄偺偱偡偑丒丒丒乯 偪傚偭偲壖攝慄偱揹尮傪擖傟偰傒傑偟偨丅儌乕僞乕幉偵傑偩億僥儞僔僆儊乕僞傪晅偗偰偄側偄偺偱庤偱夞偟偰摦嶌偝偣偰尒傑偟偨丅俥俤俿偑攋夡偡傞偐偲巚偭偨傜崱偺偲偙傠慡慠栤戣側偄傛偆偱偡丅 俲俼俽亅係侽侾係俫倁傕敪攧偝傟丄婥偵側偭偰偄傞偺偱偡偑丄儘儃僢僩嶌傞暘偺悢傪偦傠偊傞偵偼偪傚偭偲婥崌偑偄傞抣抜偵側偭偰偟傑偆偺偱丄傑偢偼悢屄僒儞僾儖偱峸擖偡傞偐傕抦傟傑偣傫偑丄偙偺揷媨儌乕僞乕傕柺敀偦偆偱偡丅 |
|||||||||
 |
 |
||||||||
| 俲俼俽亅係侽俀係俫倁偺婎斅傪庢傝奜偟偨偲偙傠丅億僥儞僔僆儊乕僞偺婎斅傪奜偡偲偒丄僗儖乕儂乕儖傕彮偟敳偗偰偟傑偭偨丅 | 幚尡梡偵峸擖偟偰偁偭偨揷媨偺僊儎乕僪儌乕僞乕丅
俹俷俵偺戜嵗傪庢傝晅偗偰偁傞曽偑侾乛俈俆偱庤慜懁偼侾乛俁侽侽偺僊儎斾丅 |
||||||||
 |
|||||||||
| 揷媨偺僊儎乕僪儌乕僞乕偲俲俷偺婎斅傪愙懕偟偨偲偙傠丅
壖攝慄偱偺摦嶌偱俷俲偦偆側偺偱丄偆傑偔儅僂儞僩偱偒傞傛偆偵晹昳嶌傝偱偡偹丅 |
|||||||||
| 俀侽侽俆擭侾俀寧侾俋擔
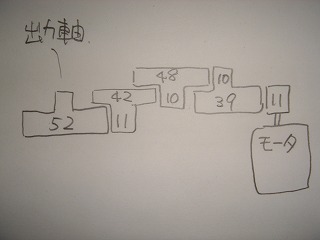
俥俹俧俙偺婎斅偼崱偺偲偙傠恑揥側偟丅 偱丄俲俼俽亅係侽俀係俫倁傪攦偭偨偲偒偵丄偄偭偟傚偵僒乕儃傾乕儉係侽侽侽俙傕攦偭偨偺偱偡偑丄乽俲俼俽亅係侽侾係俫倁偵偼屼棙梡偵側傟傑偣傫乿偲彂偄偰偁傞丅偪傚偭偲婥偵側傝傑偡丅 俲俼俽亅係侽俀係俫倁偺僊儎傪悢偊偰傒傑偟偨丅庤彂偒偱偪傚偭偲娫敳偗偱偡偹丅 |
||||
 |
||||
| 俀侽侽俆擭侾俀寧侾侾擔
俤倅亅俥俹俧俙傪巊偭偨僒乕儃僐儞僩儘乕儖婎斅偱偡偑丄嶌傝捈偟偰偄傞婎斅偑偳偆傕偆傑偔側偄丅倁俫俢俴傕彮偟偄偠偭偨偺偱偙傟傕塭嬁偟偰偄傞傒偨偄丅傕偆彮偟婥傪擖傟偰挷傋側偄偲偄偗傑偣傫丅偮偓偼偓婎斅偱嶌偭偨傕偺偼偦偙偦偙摦偄偰偄傞偺偵丒丒丒丅 偪傚偭偲婥暘揮姺偲偟偰丄崱傑偱夡偟偨僒乕儃偺廋棟傪偟傑偟偨丅 俲俼俽亅俀俁係俇俬俠俽丂俼倕倓丂倁倕倰倱倝倧値偱丄儌乕僞乕丄僊傾丄俥俤俿丄嫮壔僺儞偺岎姺丄幉庴偗偑嬥懏偵側偭偨僊傾働乕僗偺庢傝晅偗傪偟傑偟偨丅偙偙傑偱傗傞偲俲俼俽亅俀俁俆侽俬俠俽偵側偭偰偟傑偄傑偟偨丅偨偩偟丄俥俤俿偼俬俷俼偺俈俁俉俋偵偟傑偟偨丅 偱丄傕偆堦偮丅偍帋偟偱丄俲俼俽亅係侽俀係俫倁傪攦偭偰偟傑偄傑偟偨丅 傑偢偼丄偍寛傑傝偺丄摦嶌慜偺暘夝妋擣丅 偪傚偭偲傑偨怴偟偔愝寁偱傕偟偨偔側傝傑偡偹丅 |
|||||||||
 |
 |
||||||||
| 塃偑夡偟偨僒乕儃偱丄嵍偑廋棟梡僷乕僣丅 | 廋棟姰椆丅俀屄暅妶偱偡丅傑偩丄壗屄偐夡傟偰偄傑偡偑丄偦偺偆偪廋棟偟傑偡丅 | ||||||||
 |
 |
||||||||
| 俲俼俽亅係侽俀係俫倁丅 | 婎斅懁丅戝偒偄偩偗偁偭偰寗娫偑懡偄偱偡丅 | ||||||||
 |
|||||||||
| 僊傾偼庽帀惢偱偡偑丄崱傑偱偺僒乕儃偺偲偼堘偄丄偱偐偄偱偡丅 | |||||||||
| 俀侽侽俆擭侾俀寧俇擔
偙偙偺偲偙傠丄慡慠峏怴偟偰偄傑偣傫偱偟偨丅媨揷偝傫偺儁乕僕偵帡偰偒偨偐側丠丠丠 偍偭丄媨揷偝傫偺儁乕僕丄峏怴偝傟偰偄傞偱偼側偄偐丒丒丒丅乽晧偗傞偐丄偙傜両乿仼僗儘僢僩傗傞恖偼夝傞偩傠偆丅 摢偺拞偱偼丄怓乆側峔憐偑偄偭傁偄側傫偱偡偑丄側偐側偐幚尰偱偒偰偄傑偣傫丅 偲偼偄偆傕偺偺丄俶亅俠倎倰倓傪峸擖偟偰偐傜傑偨堦偮怴偟偄偙偲傪傗偭偰偄傑偡丅 偙傫側姶偠側偺偱丄僔儕傾儖晹暘偺僾儘僌儔儉嶌惉傕慡偔傗偭偰偄傑偣傫丅 崱丄庤傪偮偗偰偄傞偺偑俥俹俧俙丅埲慜丄俠俻弌斉偺傕偺傪峸擖偟偰偪傚偭偲偩偗摦偐偟偨傑傑曻抲偟偰偁偭偨傕偺傪堷偭挘傝弌偟偰丄幚尡偟偰偄傑偟偨丅偦偺懠丄埲慜嶌偭偨僓僀儕儞僋僗偺俰俿俙俧婎斅偑偆傑偔摦偐側偐偭偨傕偺偑摦偔傛偆偵側偭偨偺偱僨僓僀儞僂僃乕僽偺晅榐婎斅偺俽俹俙俼俿俙俶俁傕摦偐偟偨傝偲怓乆傗偭偰偄傑偟偨丅 俥俹俧俙偵庤傪偮偗傛偆偲巚偭偨偺偼丄俶亅俠倎倰倓傪峸擖偟偨偑儀乕僗儃乕僪傪傕偆彮偟彫偝偔弌棃側偄偐偲峫偊偰偄傞偆偪偵丄俶亅俠倎倰倓偺俬乛俷偲僒乕儃僐儞僩儘乕儖傕慻傒崬傫偱偟傑偍偆偲偄偆峫偊丅 俶亅俠倎倰倓偺儀乕僗儃乕僪偼丄俠俹俴俢乮俠倧倧倢俼倳値値倕倰乯偑嵹偭偰偄傑偡偑丄俠倧倧倢俼倳値値倕倰偵僒乕儃僐儞僩儘乕儖偩偗傪慻傒崬傫偱傕俇僒乕儃暘偑傗偭偲側偺偱俥俹俧俙偟偐側偄偱偡偹丅偱丄傾儖僥儔偺俠倷們倢倧値偲僓僀儕儞僋僗偺俽俹俙俼俿俙俶俁偱帋偟偰偄偨偺偱偡偑丄俆倁僩儗儔儞僩偱偼側偄偺偱懠偺暔偱偄偄偺偑側偄偐偝偑偟偰偄偰僓僀儕儞僋僗偺俽俹俙俼倀俿俙俶俀偩偲俷俲側偺偑暘偐傝傑偟偨丅 愮愇偵傕僠僢僾偼攧偭偰偄傞偺偱偡偑丄傑偢偼幚尡偲偄偆偙偲偱僆僾僥傿儅僀僘偺俤倅亅俥俹俧俙傪峸擖丅 崱尰嵼偼丄幨恀偺俤倅亅俥俹俧俙偵僗僀僢僠偲僒乕儃梡偺僿僢僟僺儞傪晅偗偨婎斅傪嶌惉偟偰丄俀侽侽係擭俇寧崋偺僀儞僞乕僼僃乕僗偺倁俫俢俴傪嶲峫偵偲傝偁偊偢僒乕儃偑摦偔偲偙傠傑偱棃偰偄傑偡丅 偦偭偪偺傎偆偼丄傕偆彮偟幚尡偟偰偐傜傾僢僾偟偨偄偲巚偭偰偄傑偡丅 |
|||||||
 |
 |
||||||
| 僓僀儕儞僋僗梡偵嶌惉偟偨俰俿俙俧婎斅 | 俰俿俙俧婎斅偺棤懁丅傎偲傫偳晹昳偑側偄偱偡丅 | ||||||
 |
 |
||||||
| 僨僓僀儞僂僃乕僽儅僈僕儞偺晅榐婎斅偲俠俻弌斉幮偺俥俹俧俙儃乕僪偱妛傇榑棟夞楬愝寁偵偮偄偰偄傞婎斅丅晅榐婎斅偼丄僓僀儕儞僋僗偺俽俹俙俼俿俙俶俁偱俠俻弌斉幮偺偼傾儖僥儔偺俙俠俤倃偑偺偭偰偄傑偡丅 | 僆僾僥傿儅僀僘偺俤倅亅俥俹俧俙丅摦嶌僥僗僩拞偺幨恀偱偡丅 | ||||||
| 俀侽侽俆擭俋寧俀俈擔
偪傚偭偲丄嶌嬈偑備偭偔傝偵側偭偰偄傞丅寢峔旀傟偰偄傞丅 偨偩丄戞俈夞偺帪傛傝偼偐側傝恑揥偟偰偄傞丅戞俈夞偺帪偼丄摦偔偐傕暘偐傜側偄傑傑丄戝夛慜擔偵傗偭偲棫偭偨忬懺偩偭偨偑丄戞俉夞偱偼丄儌乕僔儑儞傕嶌惉偟摦嶌偝偣傞偙偲偑弌棃偨丅偨偩丄俴亅俠倎倰倓俙偲昉楬婎斅偺捠怣偑偆傑偔峴偐側偐偭偨偺偑尨場偱懯栚偱偟偨丅 偙偺晹暘偵偮偄偰偼丄備偭偔傝帪娫傪偐偗偰嶌傠偆偲巚偄傑偡丅側傫偲側偔丄峫偊偰偄傞宍偵側傝偦偆偱偡丅 偨偩丄昉楬婎斅偺巊偄曽傪偳偆傕姩堘偄偟偰偄傞晹暘傕偁傞傛偆側偺偱丄偙傟傕傕偆彮偟偄偠偭偰傒傛偆偲巚偄傑偡丅 戞俉夞偺梊慖摉擔丄峊偊幒偱巹偺儘儃僢僩偵偮偄偰丄栚傪偲傔傞曽偑偄傑偟偨偑丄側偵偐曄傢偭偰偄傞偺偱偟傚偆偐丠 杦偳偺晹昳傪俹俷俵偱嶌偭偰偄傞偐傜偱偟傚偆偐丠 巹偺偼丄乽俠俶俠偱偗偢偭偨偧両乿偲尒偨栚偱暘偐傞傛偆偵恘偺愓偑暘偐傞傛偆偵嶍偭偰偄傞偺偱丄偙偺曈偱傕榖戣偵偼側傝傑偡丅 崱丄傑偨丄怓乆側峔憐偑摢偺拞偵偁傝丄偳偙偐傜庤傪拝偗傛偆偐偲偄偆姶偠偱偡偑丄傑偢偼俴亅俠倎倰倓俙偲昉楬婎斅偺偲偙傠傪姰惉偝偣丄俙侽俁傪帺棫摦嶌偝偣傞偙偲偱偡偹丅 懠偺峔憐偵偮偄偰偼丄傕偆彮偟幚尡偟偰栚張偑棫偭偰偒偨傜岞奐偟傑偡丅 |
|||
| 俀侽侽俆擭俋寧俀俆擔
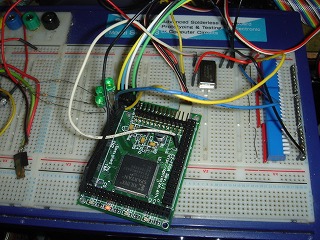
戞俉夞俼俷俛俷亅俷俶俤傕側傫偩偐傫偩偱傑偨婞尃偵側偭偰偟傑偄傑偟偨偑丄戞俋夞戝夛偵岦偗傕偆巒傑偭偰偄傑偡丅 戝夛偐傜婣偭偰偒偰偐傜偼丄偪傚偭偲攚崪偺挷巕偑埆偔偁傑傝摦偗側偄忬嫷偑懕偒傑偟偨偑丄傗偭偲暅妶偟傑偟偨丅 偱丄戝夛埲崀偼俴亅俠倎倰倓俙偲昉楬婎斅偺捠怣晹暘偺僾儘僌儔儉偺僥僗僩傪偟偰偄傑偟偨丅傑偁丄偦偙偦偙憲庴怣偱偒偰偄傑偡偑丄傕偆彮偟偪傖傫偲偟偨嶌傝偵廋惓偡傞偮傕傝偱偡丅 偙傟偲偼暿偵丄偮偄偵峸擖偟偰偟傑偄傑偟偨丅慜偐傜峫偊偰偄偨俶亅俠倎倰倓傪丒丒丒 偙傟丄孎杮偺僴儞僽儖僜僼僩偐傜敪攧偝傟偰偄傞傕偺偱丄儊僀儞偺俠俹倀婎斅偼俿俙俶俛俙俠偺俢俬俵俵僒僀僘偺暔偱偡丅 儘儃僢僩偵巊偆偵偼丄儀乕僗婎斅偑傕偭偲彫偝偐偭偨傜側側傫偰巚偄傑偡偑丄偦偺曈偼崱屻偺帠偲偟偰丄俙侽俁偵偙偺婎斅傪搵嵹偡傞偐偼傑偩暘偐傝傑偣傫偑丄娙扨側偲偙傠偐傜幚尡偟偰偄傑偡丅 巊偭偨姶偠偱偼丄俴亅俠倎倰倓俙傛傝傕俠俹倀僋儘僢僋偑忋偑偭偰偄傞偙偲偲丄俴倝値倳倶偺僇乕僱儖偑僔儞僾儖偵側偭偰偄傞偺偱婲摦偡傞帪娫偑俴亅俠倎倰倓俙傛傝傕奿抜偵憗偄偱偡丅 僴儞僽儖僜僼僩偺俫俹偵偁傞丄俴俤俢偺揰摂傪帋偟偰傒偰丄摦嶌俷俲丅偦偺懠偺俬乛俷偱僨僶僀僗愝掕傕姰椆丅 偦傟偱偼僥僗僩僾儘僌儔儉偱傕嶌偭偰傒傛偆偐偲丄奐敪娐嫬傪峔抸偟傛偆偲偟偨傜丄偳偆傕儕儞僋偑愗傟偰偄傞傛偆偩丅 偳偆偟傛偆偲偄偆偙偲偱丄俴亅俠倎倰倓俙偺奐敪娐嫬偱僥僗僩僾儘僌儔儉傪僐儞僷僀儖偟偰俶亅俠倎倰倓偱幚峴偡傞偲丄乽File not Found乿偵側偭偰偟傑偆丅偳偆偟偰丒丒丒丅傗偭傁傝懯栚偐側丄巚偄偮偮怓乆帋偟偰傒偨偲偙傠丄儔僀僽儔儕偑擖偭偰偄側偄偺偱偡偐偹丄僐儞僷僀儖偱-static偺僆僾僔儑儞傪晅偗偰摦嶌偱偒傑偟偨丅僇乕僱儖偺僐儞僷僀儖側偳偼偆傑偔偄偔偺偐偼晄柧偱丄崱屻帋偟偰傒傑偡丅 俙侽俁偺摦嶌偱丄昉楬婎斅偵儂乕儉億僕僔儑儞搊榐偡傞偲丄僒乕儃儌乕僞乕慡晹偑堦婥偵摦嶌偟丄揹埑崀壓傪婲偙偡偺偐丄俴亅俠倎倰倓俙偑儕僙僢僩偟偰偟傑偆尰徾偑偱偰偄偨偺偱丄崱夞丄暿偺揹尮憰抲傪峸擖偟傑偨丄儘儃僢僩杮懱偵庢傝晅偗傞偨傔偵僗乕僷乕僉儍僷僔僞乕傕峸擖偟傑偟偨丅 |
|||||||
 |
 |
||||||
| 俶亅俠倎倰倓傪摦嶌偝偣偰偄傞偲偙傠丅庤慜偺婎斅偼僶僢僼傽儘乕偺倀俽俛柍慄俴俙俶偱働乕僗傪奜偟偰偄傑偡丅 | 崱夞峸擖偟偨揹尮憰抲丅崱傑偱巊偭偰偄偨傕偺傛傝彫偝偔寉偔偰椙偄偱偡丅庤慜偺偼丄僗乕僷乕僉儍僷僔僞乕偱侾俥偑俀屄偱偡丅 | ||||||