‚g‚q‚eپ|‚`‚O‚Q
‚o‚پ‚’‚”‚P
‘و‚U‰ٌ‚q‚n‚a‚nپ|‚n‚m‚d‚ة‚حٹش‚ةچ‡‚ي‚¸پAٹüŒ ‚µ‚ـ‚µ‚½پB
|
–{‘ج
|
چقژ؟ | ‚o‚n‚l |
| ƒپƒCƒ“گ§Œنٹî”آ | ‚k‚پ‚“‚…‚’‚Tگ»پ@‚kپ|‚b‚پ‚’‚„‚`پA‚n‚r‚ح‚k‚‰‚ژ‚•‚ک | |
| ƒTƒuگ§Œنٹî”آ | •PکHƒ\ƒtƒgƒڈپ[ƒNƒXگ»‚g‚r‚v‚aپ|‚O‚QRG | |
| ٹضگكگ” | ‚Q‚T | |
| ژg—pƒ‚پ[ƒ^پ[ | ‚j‚q‚rپ|‚Q‚R‚S‚U‚h‚b‚rپ@‚q‚…‚„پ@‚u‚…‚’‚“‚‰‚ڈ‚ژ |
| ‚Q‚O‚O‚S”N‚WŒژ‚W“ْ
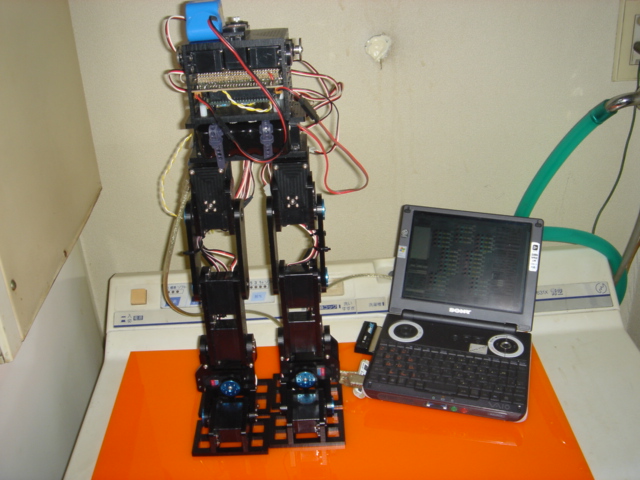
‚ب‚©‚ب‚©گi‚ـ‚ب‚¢ڈَ‹µ‚ھ‘±‚¢‚½‚ج‚ئپA•PکHƒ\ƒtƒgƒڈپ[ƒNƒX‚ج‚g‚r‚v‚aپ|‚O‚Q‚q‚f‚إ‹³ژ¦‚ھ‚¤‚ـ‚‚¢‚©‚¸پAƒ‚پ[ƒVƒ‡ƒ“چىگ¬‚ھ‘S‚ژè•t‚©‚¸‚ئ‚ب‚ء‚ؤ‚¢‚ـ‚¢پA‘و‚U‰ٌ‚q‚n‚a‚nپ|‚n‚m‚d‚جڈoڈê‚ً’f”O‚µ‚ـ‚µ‚½پB ‚VپA‚W“ْ‚ئپAڈ‚µ‚ن‚ء‚‚肵‚ؤ‚¢‚ـ‚µ‚½پB ‘O‚ةچع‚¹‚½پAگô‘َ‹@‚جڈم‚إژB‰e‚µ‚½‚ئ‚«‚ةپA‚ـ‚¾کr‚ح•t‚¢‚ؤ‚¢‚ـ‚¹‚ٌ‚إ‚µ‚½‚ھپA“dŒ¹‚ً“ü‚ê‚ؤ—§‚½‚¹‚ؤ‚ف‚½ٹ´‚¶‚إ‚حپA‚g‚q‚eپ|‚`‚O‚P‚جژ‚و‚è‚à‚¢‚¢ٹ´‚¶‚¾‚ء‚½‚ج‚إپA‚±‚ê‚ًƒxپ[ƒX‚ةگFپX‚ئ‰ü—ا‚µژں‰ٌ‚ج‚q‚n‚a‚nپ|‚n‚m‚d‚ةŒü‚¯چىگ¬‚µ‚½‚¢‚ئژv‚¢‚ـ‚·پB چىگ¬‚ةٹض‚µ‚ؤ‚حپA‚g‚q‚eپ|‚`‚O‚Qپ@‚o‚پ‚’‚”‚Q‚ة‚ؤŒِٹJ‚µ‚ـ‚·پB |
|||
| ‚Q‚O‚O‚S”N‚VŒژ‚Q‚W“ْ
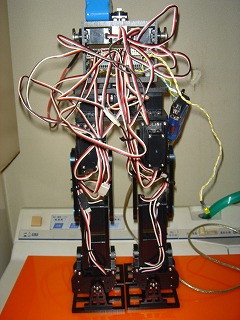
‘ٹ•د‚ي‚炸پAژٹش‚ھژو‚ꂸپA•”•i‚ًچي‚é‚ئژ¸”s‚à‘½‚پA‚ب‚©‚ب‚©گi‚ـ‚ب‚¢ڈَ‹µ‚ئ‚ب‚ء‚ؤ‚¢‚½‚ج‚إ‚·‚ھپAڈ‚µگi“W‚µ‚ـ‚µ‚½پB ‚ـ‚¾ڈCگ³‚ح•K—v‚إ‚·‚ھپA‘«•”•ھ‚ج‘g‚ف—§‚ؤ‚ھڈo—ˆ‚½‚ج‚إپA“dŒ¹‚ً“ü‚ê‚ؤ—§‚½‚¹‚ؤ‚ف‚ـ‚µ‚½پB ‚ب‚؛‚©پAگô‘َ‹@‚جڈم‚إژB‰eپB‹vپX‚ب‚ج‚إپAژتگ^‚ھ‚¢‚ء‚د‚¢‚ة‚ب‚è‚ـ‚µ‚½پB ڈم‚ة‚ج‚ء‚ؤ‚¢‚éگآ‚¢ƒoƒbƒeƒٹپ[‚ح‚â‚ك‚ؤپA•ت‚ج‚à‚ج‚ة‚µ‚و‚¤‚ئچl‚¦‚ؤ‚¢‚ـ‚·پB ‚ ‚ئژc‚é‚حپA“ھپAکrپA‚kپ|‚b‚پ‚’‚„‚`‚جژو‚è•t‚¯پAڈ¬•¨•”•iچىگ¬پA‘«— ٹٹ‚èژ~‚كپAƒ‚پ[ƒVƒ‡ƒ“چىگ¬پAƒvƒچƒOƒ‰ƒ~ƒ“ƒO‚ئ‚â‚éژ–‚ح‚ـ‚¾‚ـ‚¾‚½‚‚³‚ٌ‚ ‚è‚ـ‚·پB ٹش‚ةچ‡‚¤‚ج‚إ‚µ‚ه‚¤‚©پH |
||||||||||
 |
||||||||||
 |
 |
 |
||||||||
|
‚ئ‚è‚ ‚¦‚¸پA‚o‚b‚©‚ç‚جگ§Œن‚إ—§‚ء‚ؤ‚¢‚ـ‚·پB‰¼”zگü‚إ‚·‚ھپAŒم‚ح”zگü‚ھ‚²‚؟‚ل‚²‚؟‚لپB‚ا‚¤‚â‚ء‚ؤ‚ـ‚ئ‚ك‚و‚¤پEپEپE
|
||||||||||
 |
 |
|||||||||
|
‘«‚ـ‚ي‚è‚ح‚±‚ج‚و‚¤‚ة‚ب‚ء‚ؤ‚¢‚ـ‚·پBˆê‰پA’ـگو‚ج‚آ‚à‚è‚إ‚·پB
|
||||||||||
| ‚Q‚O‚O‚S”N‚VŒژ‚P‚S“ْ
ژٹش‚ھژو‚ꂸپA•”•i‚ًچي‚é‚ئژ¸”s‚à‘½‚پA‚ب‚©‚ب‚©گi‚ـ‚ب‚¢ڈَ‹µ‚ئ‚ب‚ء‚ؤ‚¢‚ـ‚µ‚½پB ‚ئ‚è‚ ‚¦‚¸پA‘«•”•ھ‚ج•”•i‚ًچي‚èپA‚ ‚ئ‚S‚آ‚إ‘«‚حٹ®گ¬‚µ‚»‚¤‚إ‚·پB ڈ‚µگ،–@‚ًٹشˆل‚¦‚½‚ئ‚±‚ë‚à‚ ‚è‚ـ‚·‚ھپA‚»‚ج‚ـ‚ـژg—p‚µ‚ؤ‚¢‚ـ‚·پB کr‚ةٹض‚µ‚ؤ‚حپA‚±‚ê‚©‚çچي‚è—p‚ةƒfپ[ƒ^‚ًچىگ¬‚µ‚ب‚‚ؤ‚ح‚ب‚è‚ـ‚¹‚ٌپB‚»‚ج‘¼پAڈ¬•¨پiƒtƒ‰ƒ“ƒWƒxƒAƒٹƒ“ƒO‚ج‰ں‚³‚¦—pƒpپ[ƒcپA“·‘ج‚ج•\‘¤ƒpƒlƒ‹پA”w–ت‚ج‚b‚o‚tژو‚è•t‚¯ƒAƒ“ƒOƒ‹‚ئƒJƒoپ[‚ب‚اپj‚جچىگ¬‚ھژc‚ء‚ؤ‚¢‚ـ‚·پB |
|||||||
 |
|||||||
|
‘«•”•ھ‚ج•”•i‚ً‚¨‚¢‚ؤژB‰e
‚±‚جژتگ^‚إƒGƒ“ƒgƒٹپ[‚µ‚و‚¤‚ئژv‚¢‚ـ‚· |
|||||||
 |
|||||||
|
‘«•”•ھ‚جƒpپ[ƒc
‚ـ‚¾‘g‚ف•t‚¯‚ؤ‚¢‚ـ‚¹‚ٌ |
|||||||
| ‚Q‚O‚O‚S”N‚VŒژ‚S“ْ
ٹî”آ‚ج“®چىƒ`ƒFƒbƒN‚àڈI—¹‚µ‚n‚j‚ة‚ب‚ء‚½پB‚ئ‚¢‚ء‚ؤ‚àپAƒsƒ“”z’u‚ج•دٹ·پAƒvƒ‹ƒAƒbƒv’ïچR‚جگع‘±پA“dŒ¹•”پAƒXƒCƒbƒ`‚‚ç‚¢‚µ‚©‚ب‚¢‚ج‚إٹب’P‚إ‚·پB ƒ`ƒFƒbƒN‚àڈI‚ي‚ء‚½‚ج‚إ‘g‚فچ‚ف‚ـ‚µ‚½پB “ھ‚ً‰ٌ“]‚³‚¹‚éƒTپ[ƒ{‚ئٹî”آ‚ھٹ±ڈآ‚·‚é‚ج‚إپAƒTپ[ƒ{‚جژو‚è•t‚¯‚ًڈم‚©‚çچ·‚µچ‚ق‚و‚¤‚ة•دچX‚µ‚ـ‚µ‚½پB ‘«ژٌ‚©‚ç‰؛‚ج•”•i‚ئکr‚ج•”•i‚ح‚ـ‚¾چى‚ء‚ؤ‚¢‚ب‚¢‚ج‚إپA‘پ‹}‚ةژdڈم‚°‚ب‚¢‚ئژٹش‚ھ‚ب‚‚ب‚ء‚ؤ‚«‚ـ‚µ‚½پB |
|||||||
 |
 |
||||||
|
ٹî”آ‘g‚فچ‚ٌ‚¾‚ئ‚±‚ëپi‘O–تپj
|
ٹî”آ‚ً‘g‚فچ‚ٌ‚¾‚ئ‚±‚ëپi”w–تپj
”zگü‚ً‚ا‚¤‚ـ‚ئ‚ك‚و‚¤‚©”Y‚ف‚ا‚±‚ë‚إ‚· |
||||||
| ‚Q‚O‚O‚S”N‚VŒژ‚R“ْ
‰½‚ئ‚©ٹî”آ‚ًژdڈم‚°‚ـ‚µ‚½پB‚ـ‚¾پA“®چىƒeƒXƒg‚ح‚µ‚ؤ‚¢‚ـ‚¹‚ٌپB ‚à‚ئ‚جƒxپ[ƒXٹî”آ‚©‚çژg‚ي‚ب‚¢•”•ھ‚ً‚ئ‚ء‚ؤ‚µ‚ـ‚ء‚½‚ج‚إپAڈ¬‚³‚‚إ‚«‚ـ‚µ‚½پB |
|||||||
 |
 |
||||||
|
•”•i‚ًژو‚è•t‚¯‚½‚ئ‚±‚ë
|
ٹî”آ”¼“c–ت
|
||||||
 |
 |
||||||
|
ٹî”آ”¼“c–ت
|
چ¶‚ھƒ{پ[ƒh‚ًژو‚è•t‚¯‚½‚ئ‚±‚ë
‰E‚ح‚à‚ئ‚جƒxپ[ƒXٹî”آ |
||||||
| ‚Q‚O‚O‚S”N‚VŒژ‚P“ْ
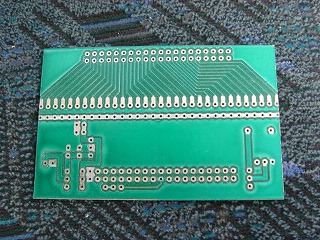
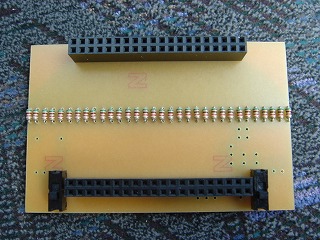
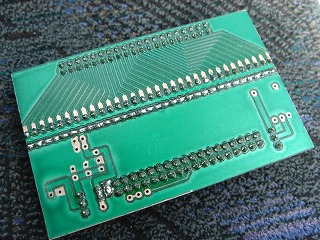
‚g‚r‚v‚aپ|‚O‚Q‚q‚f‚ً‚g‚q‚eپ|‚`‚O‚Q‚ج“·‘ج•”•ھ‚ة‘g‚فچ‚ق‚ة‚حƒxپ[ƒXƒ{پ[ƒh‚ھ‘ه‚«‚¢ˆ×پAٹî”آ‚ًچى‚ء‚ؤ‚¢‚ـ‚µ‚½پB ‚d‚`‚f‚k‚d‚إپA‰ٌکHگ}‚ح‹N‚±‚³‚¸‚ة‚¢‚«‚ب‚èƒpƒ^پ[ƒ“‚ًچىگ¬‚µپAƒvƒچƒNƒ\ƒ“‚b‚m‚b‚إچي‚è‚ـ‚µ‚½پB ƒpƒ^پ[ƒ“‚ج‘¾‚³پAٹشٹuپA‚fƒRپ[ƒh‚ض‚ج•دٹ·ƒ\ƒtƒg“™پA‚ـ‚¾‚¤‚ـ‚‚©‚فچ‡‚ي‚ب‚¢‚ج‚إژژچsچِŒë‚ًŒJ‚è•ش‚µ‚ؤ‚¢‚ـ‚µ‚½پB ٹî”آچىگ¬‚ةٹض‚µ‚ؤ‚حپAژٹش‚ھژو‚ê‚é‚و‚¤‚ة‚ب‚ء‚½‚çپAƒ\ƒtƒg‚àٹـ‚ك‚ؤ‚ـ‚ئ‚ك‚و‚¤‚ئژv‚ء‚ؤ‚¢‚ـ‚·پB |
|||||||||
 |
ژٹش‚ھ‚©‚©‚ء‚ؤ‚µ‚ـ‚¢‚ـ‚µ‚½‚ھپA‚ا‚¤‚ة‚©ژg‚¦‚»‚¤‚ة‚ب‚è‚ـ‚µ‚½پB
ٹî”آ‚جٹOژü‚ح‚b‚m‚b‚إ‚حچي‚炸پA‚g‚n‚y‚`‚m‚ج‚o‚b‚aƒJƒbƒ^پ[‚إگط‚è‚ـ‚µ‚½پB ƒOƒٹپ[ƒ“ƒŒƒWƒXƒg‚ح‚ا‚¤‚à‚¤‚ـ‚‚¢‚©‚ب‚¢‚ج‚إ‚±‚ج’ِ“x‚إ‚n‚j‚ئ‚µ‚ـ‚µ‚½پBƒ‰ƒ“ƒh“™‚ج”¼“c•t‚¯‚ً‚·‚é•”•ھ‚حپAƒJƒbƒ^پ[ƒiƒCƒt‚إچي‚èژو‚è‚ـ‚µ‚½پB ƒOƒٹپ[ƒ“ƒŒƒWƒXƒg”چ‚ھ‚µƒcپ[ƒ‹‚حپAˆب‘O‚©‚çچl‚¦’†‚إ‚·‚ھ‚ـ‚¾چىگ¬‚µ‚ؤ‚¢‚ـ‚¹‚ٌپB •”•i‚ج”z’u‚حپA‚à‚¤‚·‚إ‚ةٹ±ڈآ‚·‚é•”•ھ‚ھ‚ ‚è‚ـ‚·‚ھپA–³—‚â‚è‚إ‚àژو‚è•t‚¯‚é—\’è‚إ‚·پB |
||||||||
 |
 |
||||||||
|
•”•i‘•’…“r’†پi•”•i–تپj
ٹî”آ’†’i‚ج’ïچR‚حپA‚n‚jƒTپ[ƒ{‚جƒŒƒbƒhƒoپ[ƒWƒ‡ƒ“—p‚جƒvƒ‹ƒAƒbƒv’ïچR‚إ‚· |
•”•i‘•’…“r’†پi‚ح‚ٌ‚¾–تپj
|
||||||||
| ‚Q‚O‚O‚S”N‚UŒژ‚Q‚P“ْ
‹à—j“ْ‚ة’چ•¶‚µ‚½‚g‚r‚v‚aپ|‚O‚Q‚q‚f‚جƒپƒCƒ“ٹî”آ‚حپA‚UŒژ‚P‚X“ْ‚ة“ح‚«‚ـ‚µ‚½پB ‚j‚n‚جگشƒ‰ƒxƒ‹ƒ‚پ[ƒ^پ[‚ج‰ٌ“]ˆت’u‚ًژو‚èچ‚ق‚½‚ك‚ة‚حپAƒxپ[ƒXٹî”آ‚ةƒvƒ‹ƒAƒbƒv’ïچR‚ًژو‚è•t‚¯‚ب‚¯‚ê‚خ‚¢‚¯‚ـ‚¹‚ٌپB ‚±‚ê‚à‚à‚¤ژو‚è•t‚¯ٹ®—¹‚µپA“®چىٹm”FپB چ،‚ـ‚إ‚ج•پ’ت‚ة“®‚©‚·ژ–‚حڈo—ˆ‚ـ‚µ‚½‚ھپA‹³ژ¦‚ھ‚ـ‚¾—ا‚•ھ‚©‚ç‚ب‚¢پB ‚±‚ê‚ھ‚¤‚ـ‚ژg‚¦‚é‚و‚¤‚ة‚ب‚é‚ئپAƒ‚پ[ƒVƒ‡ƒ“چى‚è‚جŒّ—¦‚ھ‚ ‚ھ‚é‚ج‚إ‚ا‚¤‚ة‚©ƒ}ƒXƒ^پ[‚µ‚ب‚‚ؤ‚ح‚ب‚è‚ـ‚¹‚ٌپB |
||||
 |
||||
| ‚Q‚O‚O‚S”N‚UŒژ‚P‚X“ْ
چإ‹كپA‚ب‚©‚ب‚©ژv‚¤‚و‚¤‚ةگi‚ٌ‚إ‚¢‚ـ‚¹‚ٌپB •”•i‚جچي‚è‚àپA‚P“ْ‚ة‚QŒآ’ِ“xچي‚ê‚ê‚خ‚¢‚¢•û‚ب‚ج‚إ‚·‚ھپAژ¸”s‚ة‹C‚أ‚«‚â‚è’¼‚µ‚ب‚ا‚µ‚ؤ‚¢‚é‚ئ‚PŒآڈo—ˆ‚ê‚خ‚¢‚¢•û‚إ‚OŒآ‚إگi“W‚ب‚µ‚ة‚ب‚ء‚ؤ‚µ‚ـ‚ء‚½‚è‚إ‚·پB چ،Œ»ڈَ‚حپA‚UŒژ‚P‚S“ْ‚ج‘«•”•ھ‚جپzƒpپ[ƒc‚ھپA”½‘خ‘¤‚ج•ھ‚ـ‚إچىگ¬‚إ‚«‚ؤ‚¢‚ـ‚·پB ژہچغ‚جƒ‚پ[ƒ^پ[گ§Œن‚حپA‚e‚o‚f‚`‚ً•×‹’†‚إ‚·‚ھ‚ب‚©‚ب‚©—‰ًڈo—ˆ‚ب‚©‚ء‚½‚è‚ئŒ¾‚¤ڈَ‘شپB چً“ْ‚حپA•PکHƒ\ƒtƒgƒڈپ[ƒNƒX‚³‚ٌ‚ة‚g‚r‚v‚aپ|‚O‚Q‚ً‚g‚r‚v‚aپ|‚O‚Q‚q‚f‚ةƒAƒbƒvƒOƒŒپ[ƒh‚إ‚«‚ب‚¢‚©–âچ‡‚¹‚µپAٹْٹشڈI—¹‚إƒAƒbƒvƒOƒŒپ[ƒh‚حپvڈo—ˆ‚ب‚¢‚ھ•غژçƒpپ[ƒc‚ئ‚µ‚ؤƒپƒCƒ“‚جٹî”آ‚ً’ٌ‹ں‚إ‚«‚é‚ئŒ¾‚¤ژ–‚إ’چ•¶‚µ‚ـ‚µ‚½پB ژ©چىٹî”آ‚حٹش‚ةچ‡‚¢‚»‚¤‚à‚ب‚¢‚ج‚إپA‚g‚r‚v‚aپ|‚O‚Q‚q‚f‚ًژg—p‚·‚é‚ج‚ھŒ»ژہ“I‚ف‚½‚¢‚إ‚·پB ژ„‚ھ‚و‚Œ©‚ؤ‚¢‚éپAJinSato‚³‚ٌپAƒoپ[ƒjƒ“ƒO‹{“c‚³‚ٌ‚جƒyپ[ƒW‚إ‚à’…پX‚ئگi‚ٌ‚إ‚¢‚é‚و‚¤‚إپAژ„‚ج‚ھٹش‚ةچ‡‚¤‚ج‚©‘ه•ھ•sˆہ‚ة‚ب‚ء‚ؤ‚«‚ؤ‚¢‚ـ‚·پB ƒچƒ{ƒbƒg‚ة’¼گعٹضŒW‚ب‚¢‚±‚ئ‚àگFپX‚â‚肽‚¢ژ–‚ھ‘ٍژR‚ ‚é‚ج‚ةپA‚ئŒ¾‚¤ڈَ‹µ‚إ‚·پB |
|||
| ‚Q‚O‚O‚S”N‚UŒژ‚P‚S“ْ
‚±‚ج‘O‚ج“ْ—j“ْ‚ةڈH—tŒ´‚ضچs‚«پAƒ‚پ[ƒ^پ[‚ئƒAƒ‹ƒ~‚جƒTپ[ƒ{ƒzپ[ƒ“‚ئ“dژq•”•i‚ًژd“ü‚ê‚ؤ‚«‚ـ‚µ‚½پB چ،‚ـ‚إژg—p‚µ‚ؤ‚¢‚é’ƒگF‚ء‚غ‚¢ƒTپ[ƒ{ƒzپ[ƒ“‚حƒCƒgپ[ƒŒƒCƒlƒcگ»‚ج‚à‚ج‚إپAگآ‚¢‚ج‚حƒCƒNƒVƒXƒٹƒTپ[ƒ`‚ج‚à‚ج‚إ‚·پB چ،‰ٌ‚حپAƒCƒNƒVƒXƒٹƒTپ[ƒ`‚ج‚ح— –ت‚ج‚q‚ھ‚ ‚é‚ج‚إ•”•i‚ًچي‚é‚ئ‚«‚ة‚±‚ج‚q•”•ھ‚ًچl—¶‚µ‚½ƒfپ[ƒ^‚ة‚µ‚ب‚¢‚ئ‚¢‚¯‚ب‚¢‚½‚كپAگF‚à‘µ‚¦‚و‚¤‚ئƒCƒgپ[ƒŒƒCƒlƒcگ»‚ً”ƒ‚¢‚ةچs‚«‚ـ‚µ‚½پB Œ‹‹اپAƒCƒgپ[ƒŒƒCƒlƒcگ»‚àŒ»چف”„‚ء‚ؤ‚¢‚é‚ج‚حگآ‚جƒAƒ‹ƒ}ƒCƒgژdڈم‚°‚ة‚ب‚ء‚ؤ‚¢‚ـ‚µ‚½پB ’ƒگF‚جƒzپ[ƒ“‚حپA“à‘¤‚ة‰B‚ê‚é‚ئ‚±‚ë‚ةژو‚è•t‚¯پAŒ©‚¦‚é‚ئ‚±‚ë‚ةگآ‚جƒzپ[ƒ“‚ً•t‚¯‚邱‚ئ‚ة‚µ‚ـ‚µ‚½پB •”•iچي‚è‚حپA‘ٹ•د‚ي‚炸‚؟‚ه‚ٌ‚ع‚ئ‚©ژ¸”s‚ئ‚©‚إ‚ب‚©‚ب‚©گi‚ٌ‚إ‚¢‚ب‚¢‚ج‚إ‚·‚ھپA‚ـ‚½ڈ‚µگi‚ٌ‚¾‚ج‚إژتگ^‚ًچع‚¹‚ـ‚µ‚½پB ‚؟‚ه‚ء‚ئ‹ˆّ‚بژو‚è•t‚¯•û‚إ‚·‚ھپA‚ ‚ئ‚ح‚±‚ج‰؛‚ج•”•ھ‚ًچى‚é‚ئ‚ئ‚è‚ ‚¦‚¸•à‚ƒeƒXƒg‚حڈo—ˆ‚»‚¤‚إ‚·پB |
|||||||
 |
|||||||
 |
|||||||
|
‘«ژٌژü•س•”ٹg‘هژتگ^
|
|||||||
|
‘«ژٌژü•س
|
|||||||
| ‚Q‚O‚O‚S”N‚UŒژ‚P‚Q“ْ
‚±‚±‚QپC‚R“ْپA•”•iچي‚è‚ھ‚¤‚ـ‚‚¢‚©‚¸ژ¸”s‚جکA‘±‚إپAچ،“ْ‚â‚ء‚ئڈ‚µگiچs‚µ‚ـ‚µ‚½پB ژتگ^ˆê”شڈم‚حپBŒ@‚èچ‚ٌ‚إ‚¢‚é•”•ھ‚جƒcپ[ƒ‹ƒpƒXچىگ¬ƒ~ƒX‚إچي‚è‚·‚¬‚ؤژ¸”sپB ’†’i‚حپAƒcپ[ƒ‹ƒpƒX‚ًڈCگ³‚µ‚½‚ئ‚«Œ@‚èچ‚ف—ت‚ًٹشˆل‚¦‚ؤ‚P‚چ‚چگَ‚©‚ء‚½‚ج‚ة‹C‚أ‚©‚¸ƒeپ[ƒuƒ‹‚©‚çژو‚èٹO‚µ‚ؤ‚µ‚ـ‚¢‚m‚fپB ˆê”ش‚µ‚½‚ھپA‚â‚ء‚ئچي‚ꂽ•”•iپB‚إ‚àپA‚ـ‚¾•ذ–ت‚¾‚¯‰ءچH‚µ‚½‚¾‚¯‚ب‚ج‚إ— –ت‚ج‰ءچH‚ھژc‚ء‚ؤ‚¢‚ـ‚·پB |
|||||
 |
|||||
|
‚â‚ء‚ئچي‚ꂽ•”•iپi‰؛پj
|
|||||
| ‚Q‚O‚O‚S”N‚UŒژ‚W“ْ
‚ب‚ٌ‚ئ‚©پAŒ`‚ة‚ب‚ء‚ؤ‚«‚ـ‚µ‚½پB |
||||||
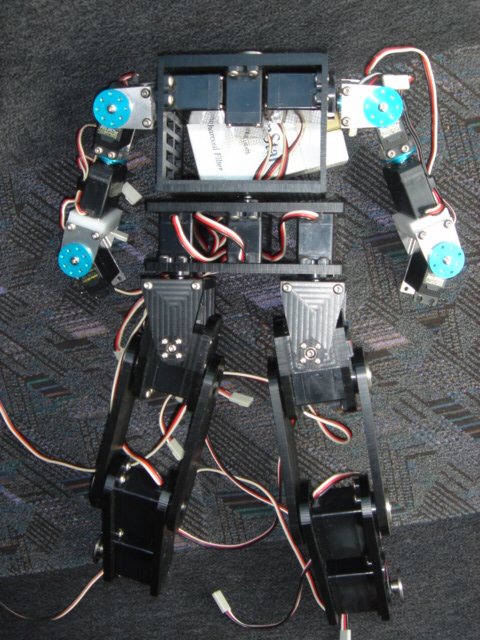 |
چ،‚ـ‚إچى‚ء‚½•”•i‚إ‰¼‘g‚ف‚µ‚ؤŒ©‚ـ‚µ‚½پB
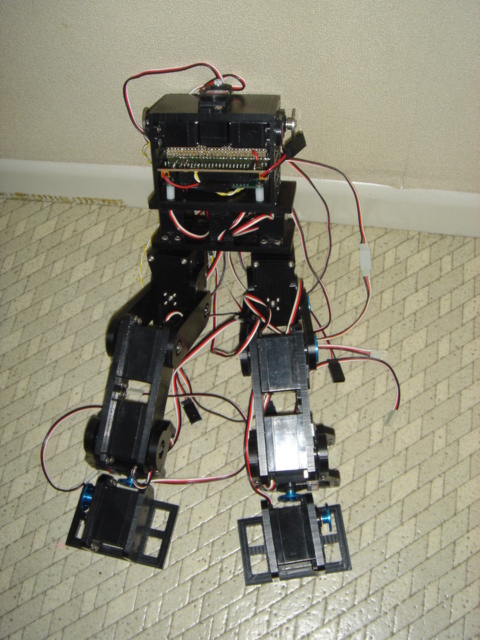
ƒ‚پ[ƒ^پ[‚حپAژg—p—\’è‚ج‚à‚ج‚ھ‚ـ‚¾‚»‚ë‚ء‚ؤ‚¢‚ب‚¢ˆ×پAژèژ‚؟‚ج•تƒ‚ƒfƒ‹‚ج‚ً‰¼‚ةژو‚è•t‚¯‚ؤ‚¢‚ـ‚·پB کr‚حپA‚ـ‚¾چى‚ء‚ؤ‚¢‚ب‚¢‚ج‚إ‚g‚q‚eپ|‚`‚O‚P‚إچى‚ء‚½کr‚ًژو‚è•t‚¯‚ؤ‚ف‚ـ‚µ‚½پB ‚±‚جکr‚حپAƒ‚پ[ƒ^پ[‚ً“®‚©‚·‚ئ”zگü‚ھ‚ ‚½‚ء‚ؤ‚µ‚ـ‚¤‚ج‚إپA‚à‚¤ڈ‚µٹشٹu‚ًچL‚°‚½•¨‚ًچىگ¬—\’è‚إ‚·پB ‘«ژٌ‚©‚ç‰؛پA“ھپAکr‚جچىگ¬‚ھژc‚ء‚ؤ‚¢‚ـ‚·پB |
|||||
| ‚Q‚O‚O‚S”N‚UŒژ‚S“ْ
‹r‚ئ“·‘ج‚جگع‘±•”•ھ‚ج•”•i‚ًچىگ¬‚µ‚ـ‚µ‚½پB |
|||||||
 |
 |
||||||
|
ژو‚è•t‚¯‚½‚ئ‚±‚ë
|
‚±‚ٌ‚ب•—‚ةگع‘±پ@Œم‚ح‚ث‚¶ژ~‚ك
|
||||||
| ‚Q‚O‚O‚S”N‚UŒژ‚R“ْ
ƒeپ[ƒv‚إ‰¼‘g‚µ‚ؤ‚¢‚½‚ج‚ًپAƒ^ƒbƒv‚ً—§‚ؤ‚ؤ‚ث‚¶ژ~‚ك‚µ‚ـ‚µ‚½پBژلٹ±‚¸‚ê‚ھڈo‚ؤ‚µ‚ـ‚ء‚½‚ج‚إ‚·‚ھپAچ،‚ج‚ئ‚±‚낱‚ج‚ـ‚ـ‚إچs‚«‚ـ‚·پB ژٹش‚ھ‚ ‚ê‚خپAچي‚è‚ب‚¨‚»‚¤‚ئژv‚¢‚ـ‚·پB “·‘ج•”•ھ‚ة‚ب‚é‚ج‚إ‚·‚ھپA‚؟‚ه‚ء‚ئ‚إ‚©‚¢ٹ´‚¶‚إ‚·پB‚±‚ê‚ة‚حپA——R‚ھ‚ ‚èپA‚kپ|‚b‚پ‚’‚„‚`‚جٹî”آƒTƒCƒY‚©‚ç‚«‚ؤ‚¢‚ـ‚·پB ‘¤–ت•”پiژتگ^ژè‘Oپj‚حپA‚U‚چ‚چ‚ج‚o‚n‚l‚ً‚R‚چ‚چ‚ـ‚إچي‚ء‚ؤ‚¢‚ـ‚·پB‚T‚چ‚چ‚ئ‚©‚U‚چ‚چ‚إ‚ح—ا‚©‚ء‚½‚ج‚إ‚·‚ھپA‚R‚چ‚چ‚إ“÷”²‚«‚µ‚ؤ‚¢‚é‚ئŒ‹چ\‚ن‚ھ‚ف‚ـ‚·پB ‚kپ|‚b‚پ‚’‚„‚`‚ئ‘O–ت‚ة•â‹‚ً“ü‚ê‚ê‚خ‘هڈن•v‚إ‚µ‚ه‚¤پB |
|||||
 |
|||||
|
ƒ^ƒbƒv‚ً—§‚ؤ‚ؤ‘g‚ف—§‚ؤ
|
|||||
| ‚Q‚O‚O‚S”N‚UŒژ‚P“ْ
‹vپX‚جƒAƒbƒv‚إ‚·پB •ذ–ت‚¾‚¯‰ءچH‚µ‚ؤ‚¢‚ؤ‚ـ‚¾ژdڈم‚°‚ؤ‚¢‚ب‚©‚ء‚½•”•i‚âˆب‘Oچى‚ء‚ؤ‚¨‚¢‚½‹rپi•ذ‘«•ھپj‚ب‚اچع‚¹‚ـ‚µ‚½پB ‚ب‚ٌ‚¾‚©پAڈd‚»‚¤‚إ‚·پB‚g‚q‚eپ|‚`‚O‚P‚جژ‚ح‘z’è‚و‚èڈd‚©‚ء‚½‚و‚¤‚إپAƒ‚پ[ƒ^پ[‚ھ•‰‚¯‚ؤ‚µ‚ـ‚¢‚ـ‚µ‚½‚ھپAچ،‰ٌ‚ح‚ا‚¤‚ة‚©‚µ‚½‚¢‚ئ‚±‚ë‚إ‚·پB ‚±‚ٌ‚ب’²ژq‚إپAٹش‚ةچ‡‚¤‚ج‚إ‚µ‚ه‚¤‚©پH |
|||||||
 |
 |
||||||
|
“·‘ج‘¤–ت•”•i
|
“·‘جڈم–ت•”•i
|
||||||
 |
 |
||||||
|
چک‚ـ‚ي‚è•”•i‚ئ‰¼‘gپi‚ـ‚¾ƒ^ƒbƒv‚½‚ؤ‚ؤ‚ب‚¢‚ج‚إƒeپ[ƒv‚إ‰¼ژ~‚كپj
|
|||||||
 |
 |
||||||
|
’ـگو•”•i
|
‹r•”•ھپi‘«•”•ھ‚ح‚ـ‚¾پj
|
||||||
| ‚Q‚O‚O‚S”N‚TŒژ‚P‚U“ْ
‚g‚q‚eپ|‚`‚O‚Q‚جچک‚ـ‚ي‚è‚ج•”•i‚ًگطچي‚µ‘g‚ف—§‚ؤ‚½‚ئ‚±‚ëپB چ¶‘¤‚ھپAڈم‚©‚猩‚½‚ئ‚±‚ë‚إ‰E‘¤‚ھ‰؛‚©‚猩‚½‚ئ‚±‚ë‚إ‚·پB |
|||||||
 |
 |
||||||
|
چکƒ†ƒjƒbƒgڈم–ت
|
چکƒ†ƒjƒbƒg‰؛–ت
|
||||||